South Korea’s robotics team KAIST has won the DARPA Robotics Challenge (DRC).
The DRC is a competition of robot systems and software teams vying to develop robots capable of assisting humans in responding to natural and man-made disasters.
The contest was designed to be extremely difficult.
Participating teams, representing some of the most advanced robotics research and development organizations in the world, are collaborating and innovating on a very short timeline to develop the hardware, software, sensors, and human-machine control interfaces that will enable their robots to complete a series of challenge tasks selected by DARPA for their relevance to disaster response.
The contest is a battle of robots on an obstacle course meant to simulate conditions similar to the 2011 Fukushima nuclear plant disaster.
The DRC Finals took place from June 5-6, 2015 at Fairplex in Pomona, California.
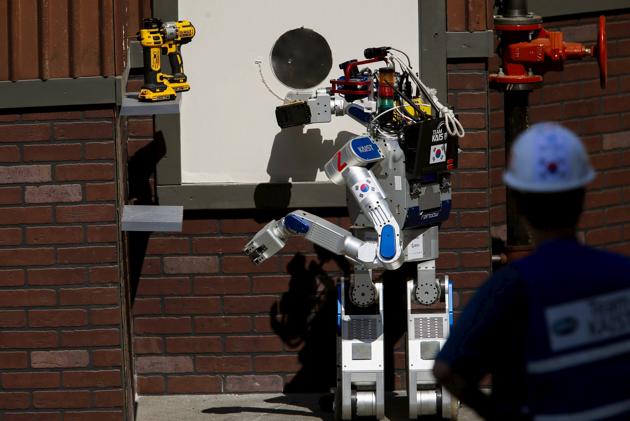
Team KAIST’s DRC-Hubo humanoid robot defeated 22 others to win the top $2 million prize from the US Department of Defense’s DARPA research unit.
The robots had an hour to complete a series of tasks, such as a driving a car and walking up steps.
The challenge involved a series of tasks for the robots to complete, somewhat autonomously, with intermittent connectivity with their operators to simulate real disaster conditions.
The challenge was the first where robots performed without being tethered and there were plenty of hard falls, soliciting groans and laughter from the crowds at the contest.
The other tasks the robots were set included getting out of a car, opening a door, drilling a hole in a wall, turning a valve and crossing rubble either by clearing a path or walking over it.
Team KAIST was the fastest, completing all the tasks in 44 minutes and 28 seconds.
Team IHMC Robotics came second, winning $1 million, and Tartan Rescue’s Chimp robot was third, winning $500,000, a day after taking a hard fall and then wowing the crowd by getting back up and back to work without human help.
The DRC Finals also included two mystery tasks over two days – on day one the mystery was pulling a lever and on day two it was pulling a plug out of one socket and inserting it into another.
Each team was given two attempts to complete the course.
There were meant to be 25 teams competing, but Japan’s team Hydra dropped out at the last minute because of an electronics accident during training.
A Chinese team was also due to compete but reportedly couldn’t get their visas in time.
Deka Arm – a robot arm capable of picking up delicate objects – has been approved for use by US medical authorities.
The Deka Arm has fingers that can move much like real ones making it easier for amputees to feed themselves, zip up clothes and unlock doors.
The robot arm has a much greater range of movement than existing devices many of which are based around metal hooks or designs more than 100 years old.
US Army veterans helped to test and refine the prosthetic limb.
The Deka Arm has fingers that can move much like real ones making it easier for amputees to feed themselves, zip up clothes and unlock doors (photo DARPA)
The Arm was developed with $40 million of research cash provided by the US Defense Advanced Research Projects Agency (DARPA). That money was part of a larger $100 million Revolutionizing Prosthetics research project run by DARPA that aimed to radically improve the range of robot limbs available to those who have lost upper limbs.
While prosthetics have improved in recent years, much of the development work has been done on legs rather than replacements for lost arms and hands. This is because of the formidable engineering challenges of reproducing the coordinated movement of human hands and fingers.
Currently, officially approved designs for replacement arms are often based around split metal hooks – a design first drawn up in 1912.
By contrast, the Deka Arm has been designed to resemble real limbs as much as possible.
“It was designed to produce near-natural upper extremity control to injured people who have suffered amputations,” DARPA spokesman Justin Sanchez told Reuters.
The device uses electrodes which detect tiny muscle twitches wearers make as they learn to control the 10 different movements the prosthetic arm can carry out.
“This prosthetic limb system can pick up objects as delicate as a grape, as well being able to handle very rugged tools like a hand drill,” said Justin Sanchez.
The US Federal Drug Administration, which oversees the prosthetic approval process, said the Deka Arm is designed for those who lost their arm at the shoulder, mid-upper arm or mid-lower arm.
The Deka Research firm behind the Arm was founded by renowned engineer Dean Kamen who invented the Segway scooter and many other devices.
US engineers have created Meshworm, a robot that mimics a worm’s movements – crawling along surfaces by contracting segments of its body.
The technique allows the machine to be made of soft materials so it can squeeze through tight spaces and mould its shape to rough terrain.
It can also absorb heavy blows without sustaining damage.
The Pentagon’s DARPA (Defense Advanced Research Projects Agency) research unit supported the Meshworm project, suggesting a potential military use.
Work on the machine was carried out by researchers at the Massachusetts Institute of Technology and Harvard University in the US, and Seoul National University in South Korea.
Details are published in the journal IEEE/ASE Transactions on Mechatronics.
Meshworm is a robot that mimics a worm's movements, crawling along surfaces by contracting segments of its body
“[The] soft body, which is essentially compliant, exhibits large strains and enables the robot to traverse small openings and reconstitute shape, and survives from large impact force on falling,” the engineers wrote.
They added that using a worm-like motion helped reduce the noise such machines produce, making them suitable “for reconnaissance purposes”.
Previous attempts to create such a robot have used gears and air-powered or pneumatic pumps. But these added to the bulk of the machines making them less practical for real-world uses.
The DARPA-supported team instead moved their machine by using an “artificial muscle” made out of nickel and titanium wire designed to stretch and contract with heat.
By wrapping this wire around a mesh-like tube the engineers replicated the circular muscle fibres of an earthworm, creating different segments in the process.
When a current was applied to part of the wire it contracted, squeezing the tube.
The team created algorithm to send a contraction wave across each of the machine’s five segments in turn, squeezing the tube and propelling it forward. This mimics the movement of its biological counterpart.
They were able to make the robot move at a rate of about 5 mm per second (0.2 inches/sec).
Two additional “muscles” were added to the sides of the machine to pull it left and right, allowing its direction to be controlled.
The researchers said that the soft nature of the robot’s body allowed it to be subjected to hammer blows and be trod on without sustaining any damage because its shape changed to help absorb the blows.
“You can throw it, and it won’t collapse,” said Sangbae Kim, assistant professor in mechanical engineering at MIT.
“Parts in Meshworms are all fibrous and flexible. The muscles are soft and the body is soft… [and] we’re starting to show some body-morphing capability.”
The Meshworm is just one of several animal-inspired projects being funded by DARPA.
Other examples include a robotic “cheetah” that can run at speeds of 18 mph (29 km/h), a micro-aircraft equipped with a camera that looks like a hummingbird, and AlphaDog – a four-legged robot designed to carry soldiers’ gear.
Cheetah, a four-legged and headless robot, has set a new world speed record, according to the US Defense Advanced Research Projects Agency (DARPA).
DARPA said Cheetah achieved 18 mph (29 km/h) on a laboratory treadmill and the previous land speed record by a legged robot was 13.1 mph.
The agency said that the project was part of efforts to develop robots designed to “more effectively assist war fighters across a greater range of missions”.
DARPA – which is run by the Pentagon – funded the Massachusetts robotics company Boston Dynamics to build the machine.
“We plan to get off the treadmill and into the field as soon as possible,” said the firm’s chief robotics scientist, Alfred Rizzi, in a statement.
“We really want to understand what is possible for fast-moving robots.”
Cheetah, a four-legged and headless robot, has set a new world speed record, according to DARPA
The robot’s movements have been modeled on those of fast-running animals in the wild. The machine is designed to flex and un-flex its back to increase the length of its stride.
The current version of Cheetah is dependent on an off-board hydraulic pump, requiring one of the researchers to hold the tubing out of its way. However, the researchers said a free-running prototype was planned for later this year.
The four-year project, which was commissioned in February 2011, ultimately aims to deliver a robot which can “zigzag to chase and evade”, and be able to come to an abrupt halt.
It builds on other models based on animals created by Boston Dynamics including its BigDog rough-terrain robot, designed to recycle energy from one step to the next, and its lizard-like Rise, which can climb walls, trees and fences by using micro-claws on its six feet and a tail for balance.
[youtube d2D71CveQwo]
This website has updated its privacy policy in compliance with EU GDPR 2016/679. Please read this to review the updates about which personal data we collect on our site. By continuing to use this site, you are agreeing to our updated policy. AcceptRejectRead More
Privacy & Cookies Policy
Privacy Overview
This website uses cookies to improve your experience while you navigate through the website. Out of these, the cookies that are categorized as necessary are stored on your browser as they are essential for the working of basic functionalities of the website. We also use third-party cookies that help us analyze and understand how you use this website. These cookies will be stored in your browser only with your consent. You also have the option to opt-out of these cookies. But opting out of some of these cookies may affect your browsing experience.
Necessary cookies are absolutely essential for the website to function properly. This category only includes cookies that ensures basic functionalities and security features of the website. These cookies do not store any personal information.
Any cookies that may not be particularly necessary for the website to function and is used specifically to collect user personal data via analytics, ads, other embedded contents are termed as non-necessary cookies. It is mandatory to procure user consent prior to running these cookies on your website.